三维变换矩阵的理解
3D空间中的一个点的坐标,可以用(x,y,z)来表示。
对这个点的坐标变换有三种操作:缩放、平移、旋转。 缩放之后,点的坐标变为(Sx*x,Sy*y,Sz*z);平移之后,点的坐标变为(Tx+x,Ty+y,Tz+z);旋转会比较麻烦一点,在后边的详细内容中描述。
上面的操作其实可以用矩阵运算来简单的表示,但是用矩阵表示变换的时候会有一个问题:用一个矩阵可以同时表示点的缩放、旋转,但是没办法表示平移了。 此时需要引入一个齐次坐标的表示方法,将点的(x,y,z)坐标表示为(x,y,z,1)。
1.缩放矩阵
点在x、y、z轴的缩放分别为Sx、Sy、Sz,那么缩放可以用下面的矩阵来表示:
| Sx | 0 | 0 | 0 |
|---|---|---|---|
| 0 | Sy | 0 | 0 |
| 0 | 0 | Sz | 0 |
| 0 | 0 | 0 | 1 |
(x,y,z,1) * S = (Sx*x,Sy*y,Sz*z,1)
2.旋转矩阵
首先看一下点绕着x、y、z三个坐标轴旋转一定角度时,坐标的表示方法:

用矩阵来表示:
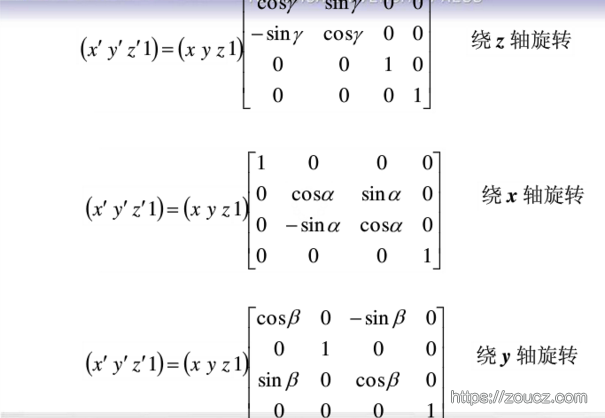
那么当点(x,y,z)绕x、y、z轴分别旋转Rx、Ry、Rz角度时,旋转矩阵R=Rx*Ry*Rz,得到矩阵如下:
| cos(Rx)*cos(Rz) | cos(x)*sin(z) | -sin(y) | 0 |
|---|---|---|---|
| sin(x)*sin(y)*cos(z)-cos(x)*sin(z) | sin(x)*sin(y)*sin(z)+cos(x)*cos(z) | sin(x)*cos(y) | 0 |
| cos(x)*sin(y)*cos(z)+sin(x)*sin(z) | cos(x)*sin(y)*sin(z)-sin(x)*cos(z) | cos(x)*cos(y) | 0 |
| 0 | 0 | 0 | 1 |
3.平移矩阵
点在x、y、z轴的平移分别为Tx、Ty、Tz,那么缩放可以用下面的矩阵来表示:
| 1 | 0 | 0 | 0 |
|---|---|---|---|
| 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 0 |
| Tx | Ty | Tz | 1 |
(x,y,z,1) * T = (Tx+x,Ty+y,Tz+z,1)
4.综合变换矩阵
综合上边的三个矩阵,可以得到最终的变换矩阵: M=S*R*T
| Sx*cos(Rx)*cos(Rz) | Sx*cos(Rx)*sin(Rz) | -Sx*sin(Ry) | 0 |
|---|---|---|---|
| Sy*(sin(Rx)*sin(Ry)*cos(Rz)-cos(Rx)*sin(Rz)) | Sy*(sin(Rx)*sin(Ry)*sin(z)+cos(Rx)*cos(Rz)) | Sy*sin(Rx)*cos(Ry) | 0 |
| Sz*(cos(Rx)*sin(Ry)*cos(Rz)+sin(Rx)*sin(Rz)) | Sz*(cos(Rx)*sin(Ry)*sin(Rz)-sin(Rx)*cos(Rz)) | Sz*cos(Rx)*cos(Ry) | 0 |
| Tx | Ty | Tz | 1 |
简写为
| m00 | m01 | m02 | 0 |
|---|---|---|---|
| m10 | m11 | m12 | 0 |
| m20 | m21 | m22 | 0 |
| Tx | Ty | Tz | 1 |
不同的编译器在内存管理方式上的不同,会导致有的情况下使用行优先的写法较好,有的情况下使用列优先的写法较好。我这边实践的过程中接触的是列优先的写法:
| m00 | m10 | m20 | Tx |
|---|---|---|---|
| m01 | m11 | m21 | Ty |
| m02 | m12 | m22 | Tz |
| 0 | 0 | 0 | 1 |
得到这样一个矩阵之后,围绕x、y、z三个轴所做的选择、缩放、平移操作,所影响的矩阵中的位置就一目了然了
4.1左右手系转换
假如我们得到了一个右手坐标系下的变换矩阵,需要把它转换为左手坐标系下的变换矩阵,那么可以将其绕一个平面翻转,假设选择绕xoy平面翻转。
分析一下翻转之后的结果:Tz变为-Tz;Rx变为-Rx;Ry变为-Ry;其他不变。
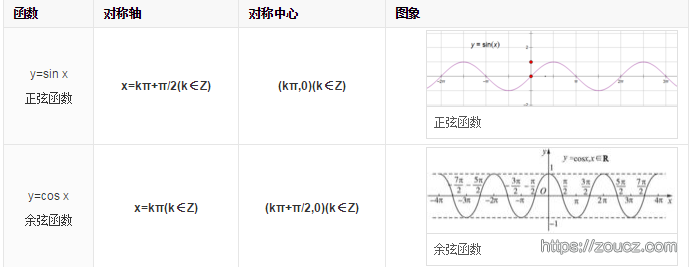
正弦和余弦函数的曲线:
将这些变化代入上面得到的最终版变换矩阵,可以得到
m02 = -m02; m12 = - m12; m20 = -m20; m21 = -m21; Tz = -Tz
将变换矩阵中这些位置的值都乘以-1,即可得到绕xoy平面翻转之后的左手系变化矩阵。
| m00 | m10 | -m20 | Tx |
|---|---|---|---|
| m01 | m11 | -m21 | Ty |
| -m02 | -m12 | m22 | -Tz |
| 0 | 0 | 0 | 1 |
也可以换一种思路,当用右手系变换矩阵变换完成之后,将坐标沿着xoy平面做个翻转,这个翻转可以用一个缩放矩阵来表示:
| 1 | 0 | 0 | 0 |
|---|---|---|---|
| 0 | 1 | 0 | 0 |
| 0 | 0 | -1 | 0 |
| 0 | 0 | 0 | 1 |
M*S 得到新的矩阵,转换为列优先的写法:
| m00 | m10 | -m20 | Tx |
|---|---|---|---|
| m01 | m11 | -m21 | Ty |
| m02 | m12 | -m22 | Tz |
| 0 | 0 | 0 | 1 |
也就是说,把第三列都乘以-1就可以了
上面两种思路可以得到等价的坐标系转换结果。
